Vibration Analysis using DragonVision® Video Deflection Technology
Contact Vibration Analysis is Not Always Effective
When first attempting to study the unknown cause for the user experienced vibration at the handle this vacuum cleaner OEM attempted to instrument the vacuum in order to study the vibration associated with the machine.
Unfortunately, the instrumentation did not lend itself well to the plastic housing and the mass of the instrumentation inadvertently negatively effected the test results.
This is one of many applications where non-contact vibration analysis using DragonVision® video deflection technology is very appropriate and helpful.
Step 1 - Identify the Problem
Non-Contact Video Deflection Selected
When traditional sensor driven vibration analysis did not work the OEM selected DragonVision® non-contact video deflection using a 5000 frame-per-second Phantom camera.
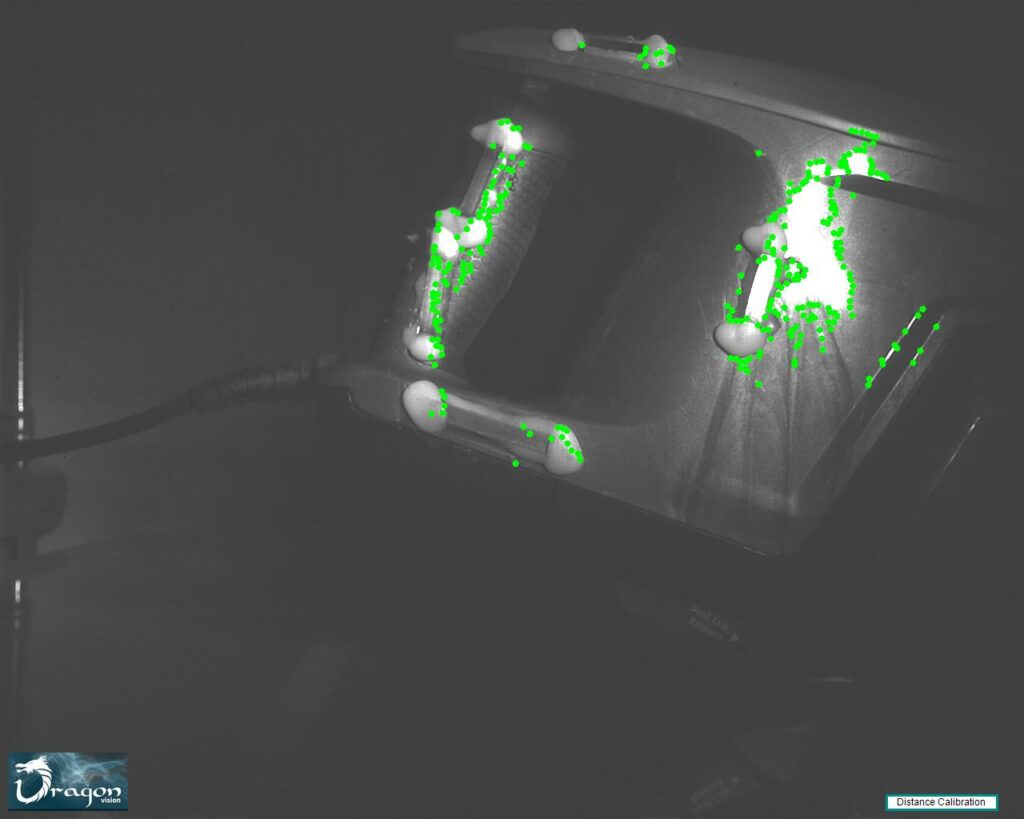
The user recorded the video and then uploaded it into DragonVision for analysis. Identifying targets within the first frame was the first step. Targets represent a bi-axial sensor in terms of capability and function.
During the target selection process specific focus was applied to the areas where the user experienced vibration occurred (on the handle) and in the area where the motor and rotor were installed because of the likelihood of the forcing function been found within that area.
Step 2 - Apply the Technology
Processing the Video
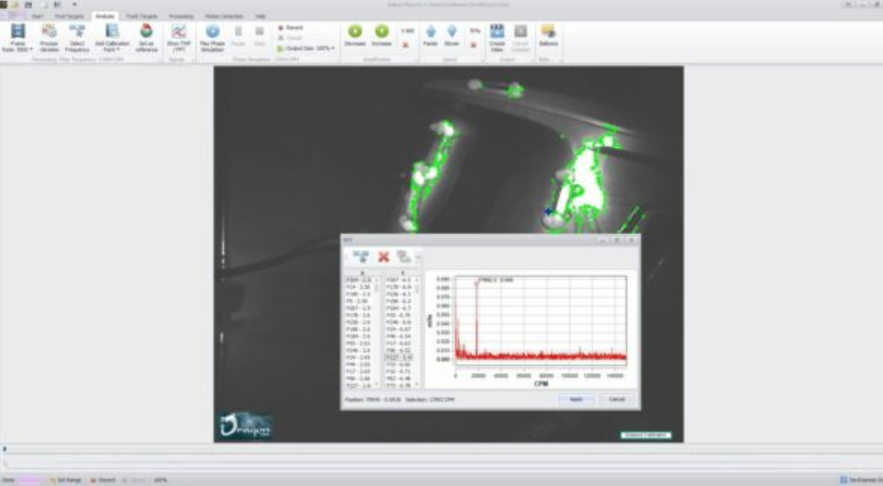
Once the targets and static points were identified processing the video and selecting the dominant frequency within the data set took approximately 2 minutes.
Quite simply the user had a total of 5 minutes invested in diagnosing the problem at this point.
Step 3 - Identify the Root Cause
Phase Simulation Model
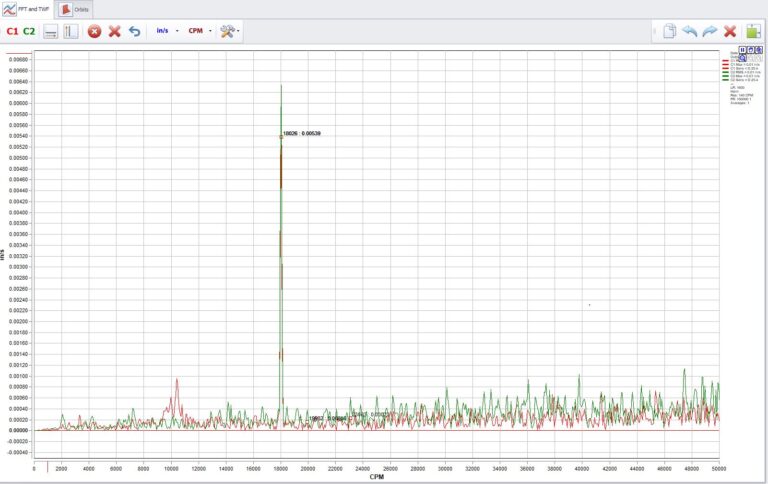
Once processing was completed a phase simulation model was performed and phase analysis clearly identified the problem. Despite precision manufacturing of the rotor the slight amount of imbalance was clearly identifiable as was the corresponding phase.
Identifying the dominant root cause via FFT analysis is a very powerful tool made possible with DragonVision® video deflection technology. Creating a visualized phase simulation allowed the user to quickly and easily see that the majority of force being applied to the device was originated by the vacuum motor/rotor combination.
Step 4 - A Picture is Worth 1000 Words... A Video Tells the Whole Story!
Completed Video Deflection Model
Within a total of 5 minutes (1 minute recording) the user was able to clearly identify the issue of imbalance that could not be easily identified by traditional methods as a result of available instrumentation, plastic housing, and the effects of added sensor mass on the housing.
The DragonVision® video deflection model was used by the design engineers to improve rotor balancing and add appropriate mitigation to the handle thereby improving the user experience.
In less than 10 minutes a problem that had been studied for nearly 50 man hours was solved using DragonVision® video deflection technology. Are you ready to see the unseen?
About the author
Dr. Michael Howard, is an American entrepreneur and Air Force veteran with a remarkable career in the predictive maintenance industry spanning over 30 years, and a variety of industrial sectors, including industrial manufacturing, reliability engineering, and instrumentation development and design organizations. Dr. Howard is a graduate of Excelsior University, Capella University, and New Charter University with degrees in Electro-Mechanical Engineering, Leadership and Organizational Management, and Engineering Management.
As the CEO of Erbessd Instruments, he leads strategy, sales, marketing, and operations in English-speaking markets. He is a certified reliability engineer, certified maintenance and reliability professional, and category III vibration analyst. Michael is a passionate advocate for wireless instrumentation, video deflection, and the Industrial Internet of Things (IIoT).
ERBESSD INSTRUMENTS® is a leading manufacturer of Vibration Analysis Equipment, Dynamic Balancing Machines, and Condition Monitoring with facilities in Mexico, the USA, the United Kingdom, and India.